First robotics-focused graduate training program covering the continuum of care from hospital to home; jointly run at U of T and UBC.
|
Souren Pashangpour I'm a PhD candidate at ASBLab, University of Toronto, advised by Prof. Goldie Nejat, and a recipient of the NSERC CREATE Healthcare Robotics (HeRo) scholarship. My research focuses on human-centered control of humanoid helpers for social and physical human–robot interaction in service and healthcare settings. I'm interested in how robots can use foundation models, multimodal reasoning, embodiment-aware interaction, and long-horizon planning to behave safely, expressively, and usefully around people. Outside the lab, I work on practical software, data tooling, and sensing-system demos through Rouge Applications, a small engineering company I build with longtime friends and engineering collaborators. Away from the computer, I enjoy weightlifting, archery, Brazilian jiu-jitsu, being outdoors, and taking care of my 1989 IROC-Z28 Camaro. |

|
Publications |

|
ExpressMM: Expressive Mobile Manipulation Behaviors in Human–Robot Interactions
Souren Pashangpour, Haitong Wang, Matthew Lisondra, Goldie Nejat IEEE RO-MAN, 2026 (Accepted) arXiv A multi-foundation-model framework for expressive, interruptible mobile manipulation in human–robot interaction. ExpressMM combines a multimodal perception module, a VLM-based interaction planner, and a VLA-based controller so a TurtleBot4 with a SO-101 arm can interpret speech and visual context, generate expressive action sequences, execute coordinated base–arm motions, and replan when users interrupt or redirect the task. In a live collaborative-assembly demonstration study, participants found the robot's behaviors clear and socially expressive, while also showing the expected caution around trust and safety for physical object-handling interactions. |
|
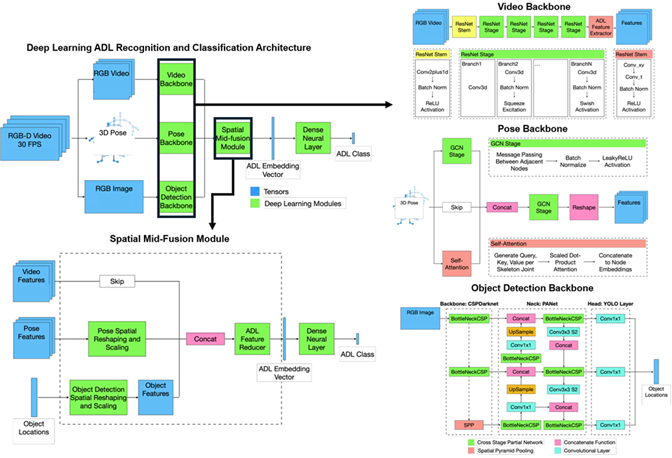
POVNet+: A Deep Learning Architecture for Socially Assistive Robots to Learn and Assist with Multiple Activities of Daily Living
Fraser Robinson, Souren Pashangpour, Matthew Lisondra, Goldie Nejat Advanced Robotics (under review), 2026 arXiv A multimodal deep-learning architecture for socially assistive robots to recognize and monitor activities of daily living in real time. POVNet+ fuses RGB video, 3D skeletal pose, and object-location features using a spatial mid-fusion method, then uses ADL and motion embedding spaces to distinguish between seen ADLs, unseen ADLs, atypically performed ADLs, and non-ADL movements. In experiments, it outperformed several unimodal and multimodal HAR baselines on within-domain and out-of-domain ADL recognition, and was integrated on the socially assistive robot Leia to proactively initiate assistance in a cluttered home-like environment. |

|
The Future of Intelligent Healthcare: A Systematic Analysis and Discussion on the Integration and Impact of Robots Using Large Language Models for Healthcare
Souren Pashangpour, Goldie Nejat Robotics (MDPI), vol. 13, no. 8, 2024 paper / DOI A systematic review of how large language models can be integrated into healthcare robots to help address aging populations and clinician shortages. Surveys current LLM-enabled capabilities, identifies open challenges in safety, grounding, and deployment, and lays out a research agenda for trustworthy clinical use. |

|
LectureGPT: An LLM-Based Multimodal Lecturing Pipeline for Socially Assistive Humanoid Robots
Souren Pashangpour, Goldie Nejat IEEE Transactions on Learning Technologies, 2026 (Under Review) An LLM-based architecture that enables a NAO social robot to autonomously generate and deliver a university lecture from instructor-provided notes. LectureGPT segments lecture slides, uses GPT-4 with EmoPrompt to generate natural-language explanations, then applies chain-of-thought prompting to insert synchronized robot action commands into the script so speech, gestures, body movements, slide transitions, and video playback are coordinated through the robot's low-level controller. In a 40-minute classroom HRI study with fourth-year engineering students, the system reduced lecture-preparation time compared with manual robot programming and was generally perceived as informative, engaging, and expressive, while also revealing limits around adaptation, clarification, and measurable learning gains. |

|
Design and Development of a Novel Haptic Device for Plucked Musical Instrument AR Simulation
Pooyan Nayyeri, Everly Conrad-Baldwin, Kourosh Zareinia, Souren Pashangpour (acknowledgements) IEEE, 2023 paper (PDF) / IEEE Xplore A wearable haptic device for AR simulation of plucked musical instruments, using a pair of parallel five-bar mechanisms to move a physical string piece against the user's fingertip and emulate plucking interactions. During my third year of undergrad, I was acknowledged for developing the Python Leap Motion controller code, which handled hand/finger pose tracking, finger extension/contraction detection, virtual-string zone detection, and the high-level state machine that sent serial commands to the Arduino controller to switch the mechanism between rest, engaged, and pluck configurations. |
Projects |
|
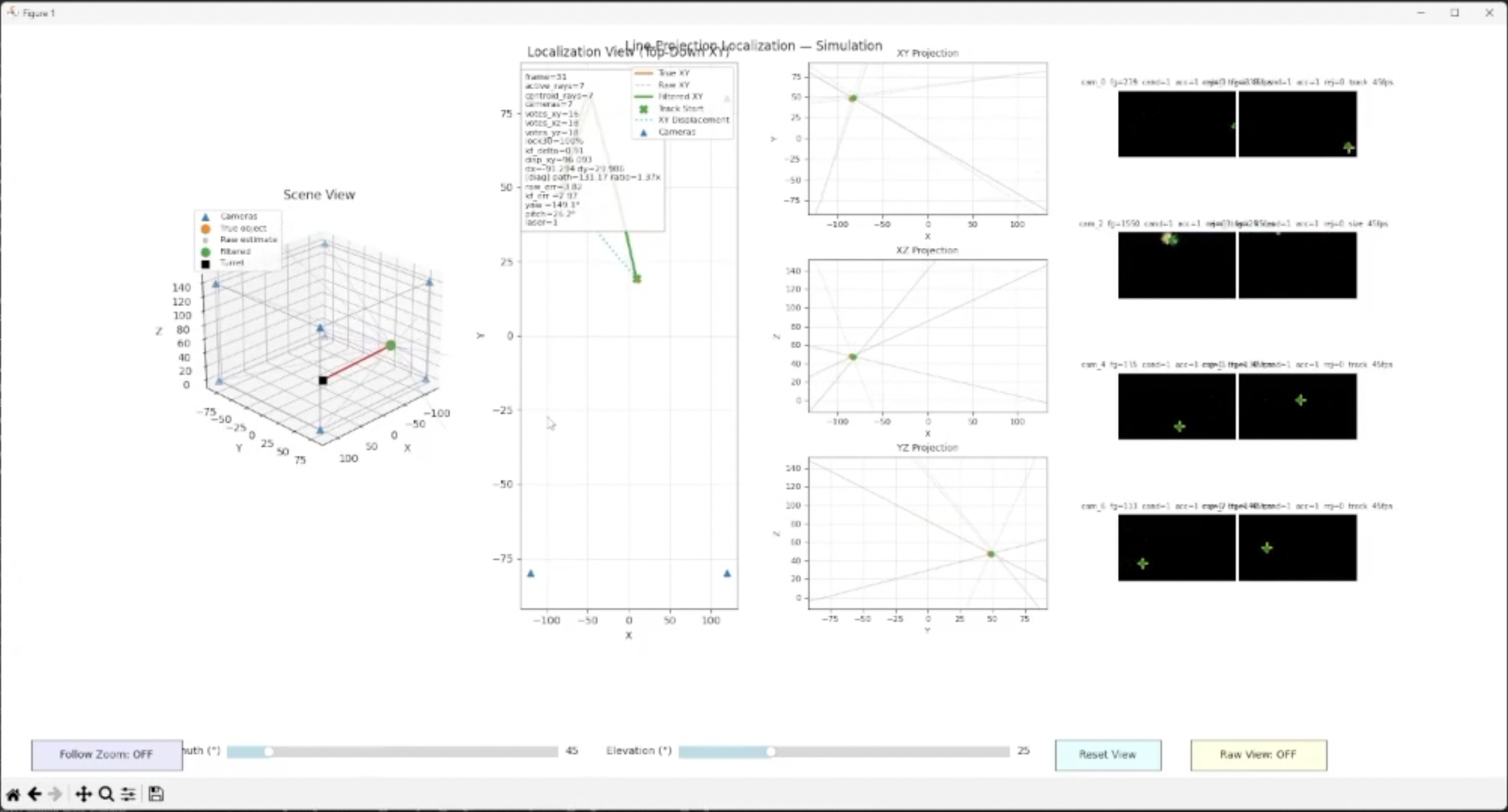
LocalEyes — Low-Cost Distributed 3D Tracking System
Souren Pashangpour, Mahyar Tajeri, Gibran Rajput 2025 website / video |

|
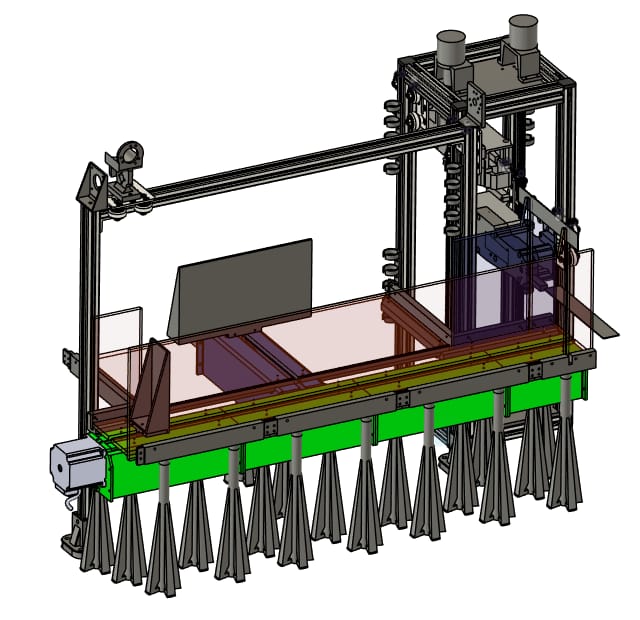
Breadbot: Automated Bread Cutting Machine
Souren Pashangpour, Mahyar Tajeri, Gibran Rajput 2025–2026 A custom bread-processing machine for restaurant operations. My role was mainly system design and technical blueprinting: defining the overall architecture, breaking the machine into mechanical / electrical / software subsystems, selecting key components, and guiding early design iterations so the team could move from concept to buildable hardware. I also assisted across hardware and software design, and developed an in-house sensing approach: a rotary-encoder lever gauge that mechanically maps loaf topology so cuts can be adjusted around weak points in the bread and meet slice-height / trimming requirements. |

|
Autonomous Drone Racing with the Crazyflie (AER1217)
Souren Pashangpour, Gibran Rajput AER1217 — Development of Autonomous UAS, UTIAS, 2025 Full perception, planning, and control stack for an autonomous Crazyflie navigating a gate-based racing course. Combines on-board state estimation with a trajectory planner that respects the quadrotor's actuation limits, achieving consistent gate fly-throughs in flight tests. |
|
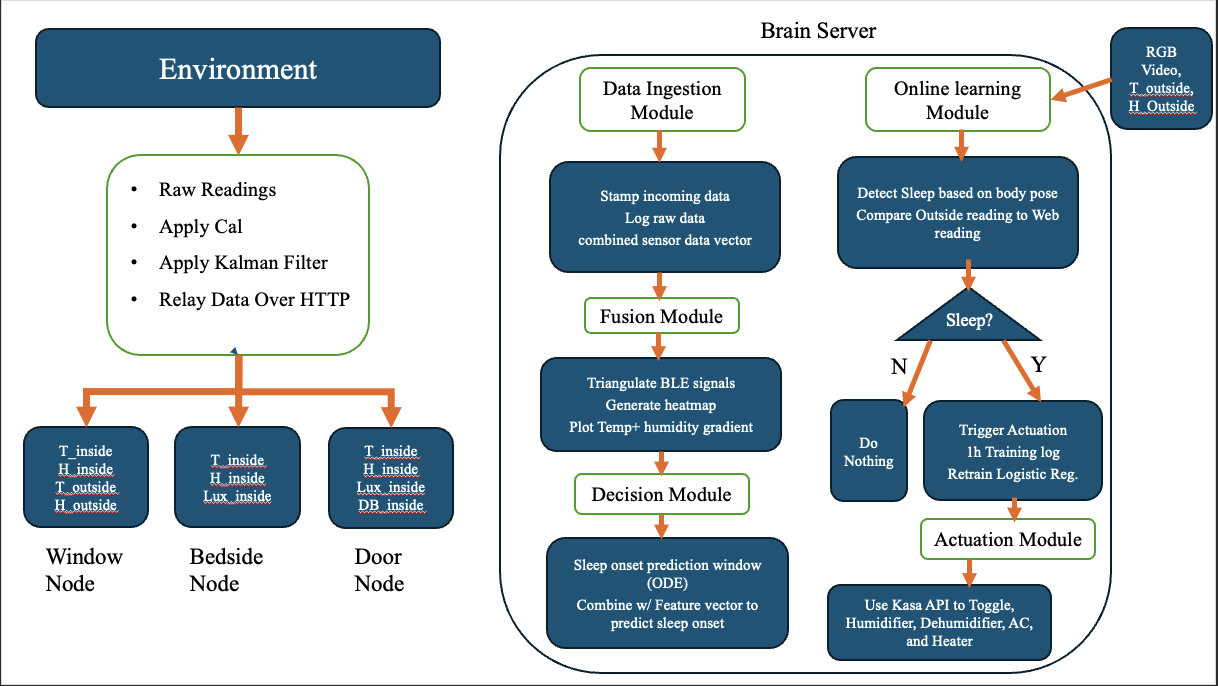
Sleep-Onset Prediction with Intelligent Sensor Networks
Souren Pashangpour, Sohrab Roointan Course project, Intelligent Sensor Networks, 2024 slides (PDF) A distributed intelligent sensor network for comfort monitoring and sleep-onset prediction. ESP32-S3 sensing hubs placed at the bedside, window, and door collect localized temperature, humidity, light, acoustic, BLE/RSSI, and indoor–outdoor gradient data, then stream calibrated and Kalman-filtered readings to a central server over TCP. The server builds a spatio-temporal semantic map using inverse-distance weighting between nodes, estimates room thermal dynamics with a first-order ODE, and uses camera-derived posture/presence labels only as supervision for training a logistic-regression model to predict sleep-related state transitions and recommend proactive climate-control actions. |
|
Autonomous RL Racing with Strategic Decision Making
Souren Pashangpour, Gibran A. Rajput, Zicheng Wang Course project, 2023 code / report (PDF) A hierarchical reinforcement-learning racing framework that combines high-level macro-action planning with low-level vehicle control. A PPO-based strategic layer decides when to continue driving or take pit stops under fuel and tire-wear constraints, while a pre-trained PPO-LSTM visual controller handles steering, throttle, and braking. Trained in simulated racetracks over roughly 28 hours, the system reduced unnecessary pit stops and achieved faster lap times than a human baseline in controlled trials. |
|
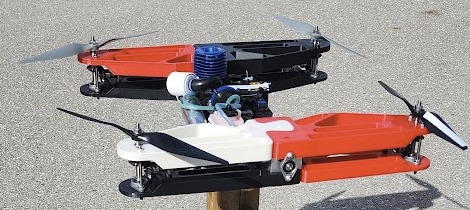
Exploration into the Use of Gas Power for Lifting Operations
Souren Pashangpour, Karim Akl, Michael Hyunh, Gibran Ahmed Rajput Toronto Metropolitan University — Supervisor: Shudong Yu, 2023 conference paper (PDF) / project report (PDF) A scaled-model gas-powered VTOL device designed to lift personnel for high-altitude operations, including mountainous terrain, high-rise rescue, and disaster response, where ICE energy density can outperform batteries. Completed in four months under the supervision of Dr. Shudong Yu, the system used a two-stroke nitro engine to drive four propellers through a custom bevel-gear powertrain on a 3D-printed chassis reinforced with steel rods, with major subsystems sized using von Mises and Goodman criteria. Bench tests on thrust, fuel consumption, vibration, thermal behavior, and structural FEA characterized the design envelope and identified the OEM clutch and powertrain losses as the primary performance bottlenecks. |
Other Projects
-
 Vaxter
Vaxter
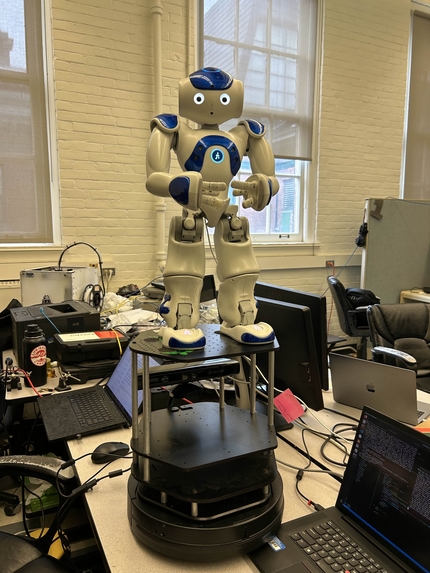
An AI health companion built with Mahyar, Gibran, and teammates that combined a NAO robot and a TurtleBot using ROS / C++, Python, OpenCV, PyTorch, Whisper STT, TTS, and multimodal LLMs. The robot followed users, recognized objects, and provided health and activity reminders, with real-time tracking, navigation, speech, and AI processing all running under hackathon time constraints. -
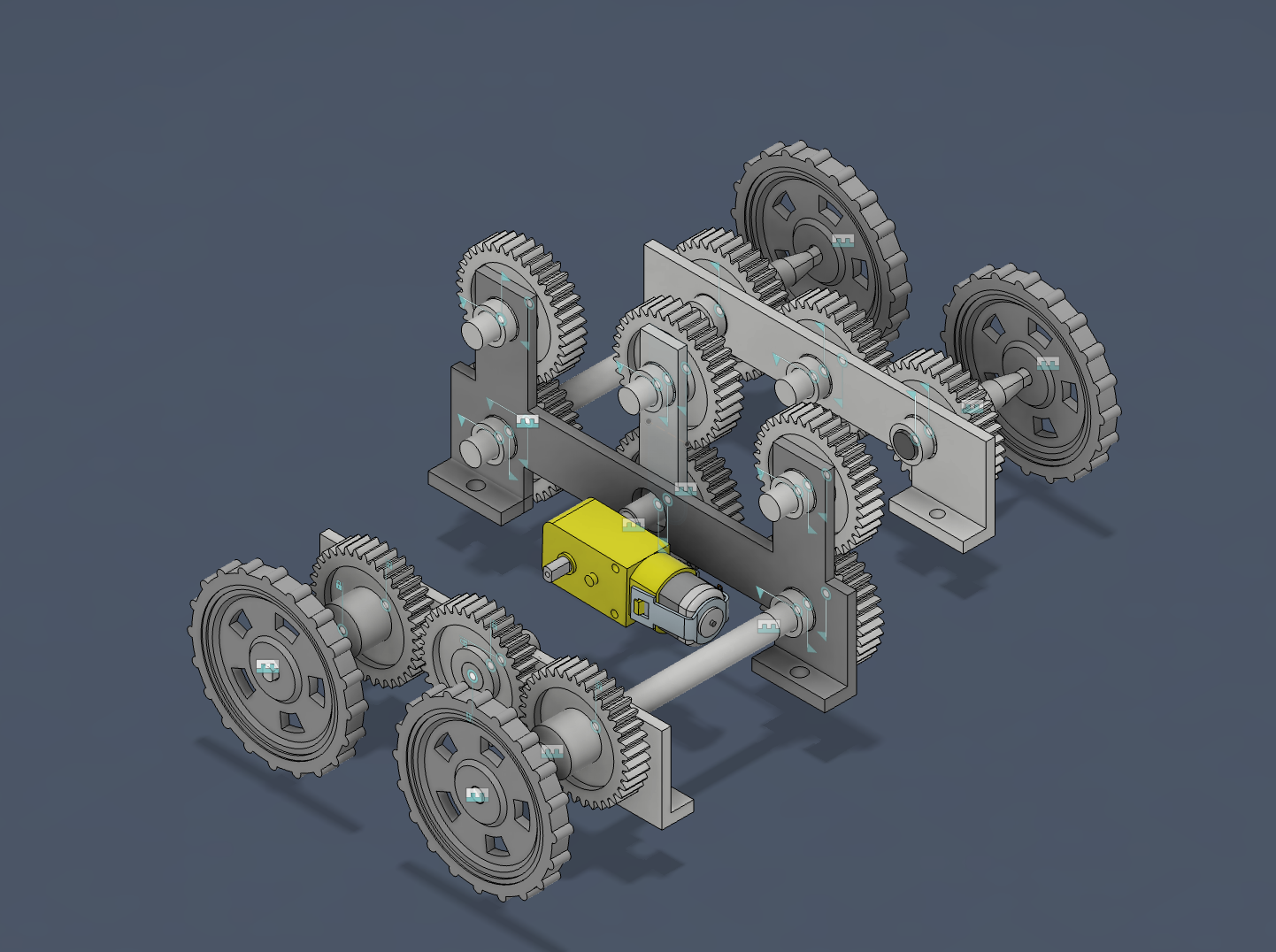 Single-Actuator Car
Single-Actuator Car
Souren Pashangpour, Gibran Rajput
Designed a four-wheel-drive miniature car capable of moving in all four directions using one actuator and a custom gearbox, 3D-printed assemblies, obstacle-avoidance logic, and a CoppeliaSim simulation. -
 Inverted Pendulum System
Inverted Pendulum System
Souren Pashangpour, Gibran Rajput
Designed and built a reaction-wheel inverted pendulum, including the mechanical CAD, Simulink model, PID control, and real-time system feedback. -
Quadruped Obstacle Course
Built physical obstacle-course elements in the lab for quadruped locomotion experiments and sim-to-real testing. -
Solar Intensity Tracker
An electromechanical sun-following system that uses photoresistors to track light intensity over time, logs measurements to an SD card, and enables later analysis of brightness changes throughout the day. -
Photo Deletion App
A personal phone app to quickly delete gallery photos by swiping — built because I was too lazy to clean my gallery manually and didn't want to pay for an App Store app. -
Machine-Learning Side Projects
A failed-3D-print detection model trained on scraped images, and OpenCV image-sorting tools based on image features and time-of-day lighting.
Rouge Applications & Apps |

Rouge Applications
Souren Pashangpour, Mahyar Tajeri, Gibran Rajput
Souren Pashangpour, Mahyar Tajeri, Gibran Rajput
A small engineering company for deployed web apps, mobile apps, data tools, and sensing-system demos.
ABO
Care-session records and workflow platform for an at-home autism care provider.
Open
Dirt Deposit
Soil disposal coordination for sites, loads, tickets, and hauling logistics.
Open
GoHabits
iOS habit-building app for routines, streaks, journaling, and accountability.
App Store
UHN Survey
Verified-access survey platform built for a University Health Network research study.
Open
Git-Like Data Manager
Self-hosted data package management for large research datasets, with uploads, search, pull commands, storage tracking, and recovery workflows.
Open
TheTutors
Public website for a tutoring service, including program information and contact paths.
Open
Miscellanea |
Awards
NSERC CREATE Healthcare Robotics (HeRo) Scholarship
News
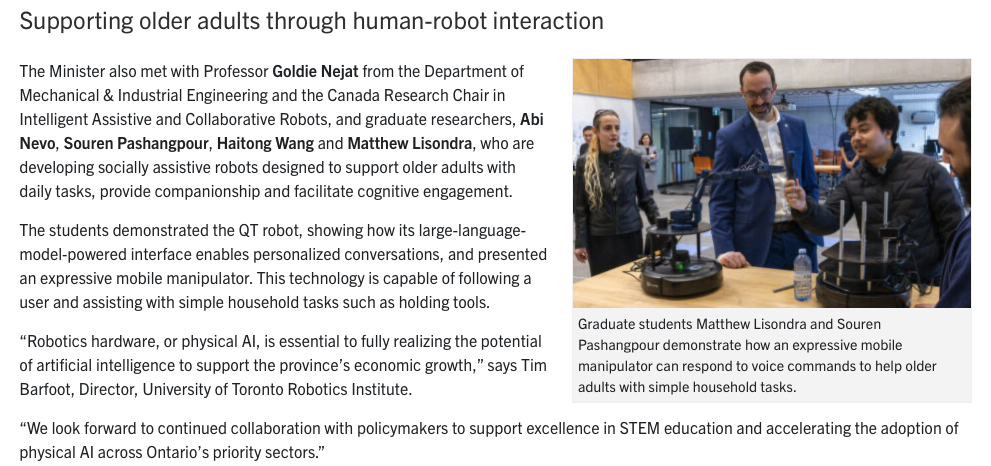
Robotics and life-sciences research on display for Minister Nolan Quinn
UTIAS coverage of our ASBLab demo to Ontario's Minister of Colleges and Universities.
Teaching
Teach C++ and ROS 2 fundamentals to 4th-year engineers; design contests; manage 6 TAs.
One of three people hired to redesign the course around TurtleBot 4 / ROS 2, including
course content, starter code, technical infrastructure, and contest structure.
Advise graduate students as they design intelligent robots for human-centered environments,
guiding project scoping, autonomy and multimodal-sensing choices, human–robot interaction
design, and the practical tradeoffs behind assistive and service robotics concepts.
Built tests, solutions, and 8 weeks of lab assignments around BPMN and Java; ran virtual
office hours, graded assignments and projects, and kept the lab and IT environments ready
for sessions.
Experience
Jr Python / C++ Developer, NAVMOBILITY
Built 3DLiSim, a desktop geomatics app (C++/.NET, Qt); integrated OpenMMS / OpenCV to segment 3D point clouds for LiDAR GCP calibration.
Engineering Intern, Honda Canada
SolidWorks 3D-printable assembly jigs for the Civic line; QC and engine assembly.
Engineering Intern, IDES / Scentroid
FANUC robot programming, plasma-cutter end-effector design, sensor & air-quality data analysis.
|
Template adapted from Jon Barron's website. |